低温专题 | 温度控制
Source:
一个完整的温度控制系统通常包含温度控制器、加热器、温度传感器、线缆等。其中,温度控制器的基本功能是将实际温度与设定值比较,并输出信号控制加热器,以维持设定值温度。
选择控制器时应考虑以下两项因素:
1. 仪器设备的工作温区
2. 输入传感器的类型(热电偶、PT100、二极管温度计、薄膜传感器等)
PID算法
当今的闭环自动控制技术都是基于反馈的概念以减少不确定性,反馈包括测量、比较、执行三部分,以PID算法最为常用。做出正确的测量和比较后,通过PID调节更好地纠正系统。
PID三个字母的含义如下:
1) P:比例(proportion)。
通常,以满量程的%或度表示温度范围,称为比例或比例带。在此范围内,控制器发生比例作用,即控制器的输出与输入误差信号成比例关系。比例带越宽,围绕设定值发生比例作用的区域越大。有时也用增益表示,增益是比例带的倒数。
2) I:积分(integration)。
积分,又称为复位,根据设定值调节比例带宽,以补偿偏离设定值的偏移量(固定偏差),也就是说,它在系统稳定后将控制的温度调节到设定值。
3) D:微分(differentiation)。
微分,又称为速率,感应系统温度上升或下降的速率,并自动调节比例带,从而将下冲或过冲降到最小。
如何调节PID值
根据目标设定所需温度值后,再设定PID参数,通常,先设定P值,I输入0(先找到合适的P后再调I);D输入0(一般不调)。
观察升温曲线,可能会出现如下情况:
(c)P值合适
通过PID调节,温度精度可达mK量级。
如果您对本期的知识点有任何疑问,请在底部留言,我们会第一时间私信为您解答!
选择控制器时应考虑以下两项因素:
1. 仪器设备的工作温区
2. 输入传感器的类型(热电偶、PT100、二极管温度计、薄膜传感器等)
PID算法
当今的闭环自动控制技术都是基于反馈的概念以减少不确定性,反馈包括测量、比较、执行三部分,以PID算法最为常用。做出正确的测量和比较后,通过PID调节更好地纠正系统。
PID三个字母的含义如下:
1) P:比例(proportion)。
通常,以满量程的%或度表示温度范围,称为比例或比例带。在此范围内,控制器发生比例作用,即控制器的输出与输入误差信号成比例关系。比例带越宽,围绕设定值发生比例作用的区域越大。有时也用增益表示,增益是比例带的倒数。
2) I:积分(integration)。
积分,又称为复位,根据设定值调节比例带宽,以补偿偏离设定值的偏移量(固定偏差),也就是说,它在系统稳定后将控制的温度调节到设定值。
3) D:微分(differentiation)。
微分,又称为速率,感应系统温度上升或下降的速率,并自动调节比例带,从而将下冲或过冲降到最小。
如何调节PID值
根据目标设定所需温度值后,再设定PID参数,通常,先设定P值,I输入0(先找到合适的P后再调I);D输入0(一般不调)。
观察升温曲线,可能会出现如下情况:
(a)P值偏大
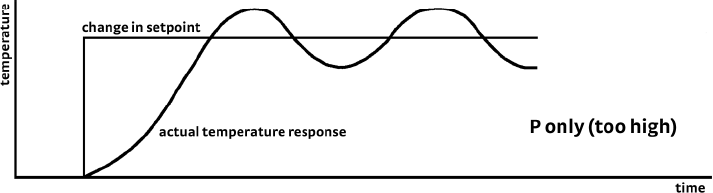
P值太大,温度会一直震荡,无法稳定。由于在设定值附近得到的P值可能不准确,所以要先关闭加热器,将温度降下来,远离设定值,减小P值后,再重新加热观察升温曲线。
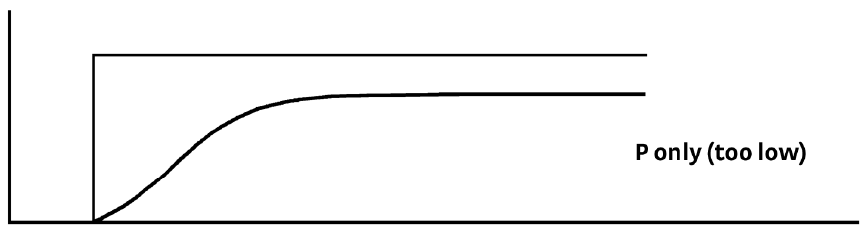
(b)P值偏小
(c)P值合适
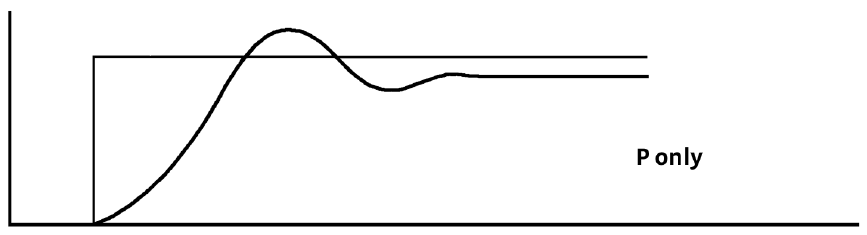
通过PID调节,温度精度可达mK量级。
如果您对本期的知识点有任何疑问,请在底部留言,我们会第一时间私信为您解答!
- Prev:No Prev
- Next:低温专题 | 如何获得低温(三)
